
 Hemos visto robots caminantes como ASIMO o AlphaDog en los que los ingenieros han trabajado para que puedan caminar. En estos casos, han desarrollado rutinas específicas que permiten que se accionen los servomotores que conforman las articulaciones de las piernas mecánicas y el robot pueda caminar, sin embargo,¿sería posible que un robot aprendiese a caminar por sí solo? La respuesta a esta pregunta no es nada sencilla pero desde la Universidad Cornell han intentado darle respuesta con el desarrollo de un robot que intenta aprender a moverse de una manera óptima por sus propios medios.
Hemos visto robots caminantes como ASIMO o AlphaDog en los que los ingenieros han trabajado para que puedan caminar. En estos casos, han desarrollado rutinas específicas que permiten que se accionen los servomotores que conforman las articulaciones de las piernas mecánicas y el robot pueda caminar, sin embargo,¿sería posible que un robot aprendiese a caminar por sí solo? La respuesta a esta pregunta no es nada sencilla pero desde la Universidad Cornell han intentado darle respuesta con el desarrollo de un robot que intenta aprender a moverse de una manera óptima por sus propios medios.
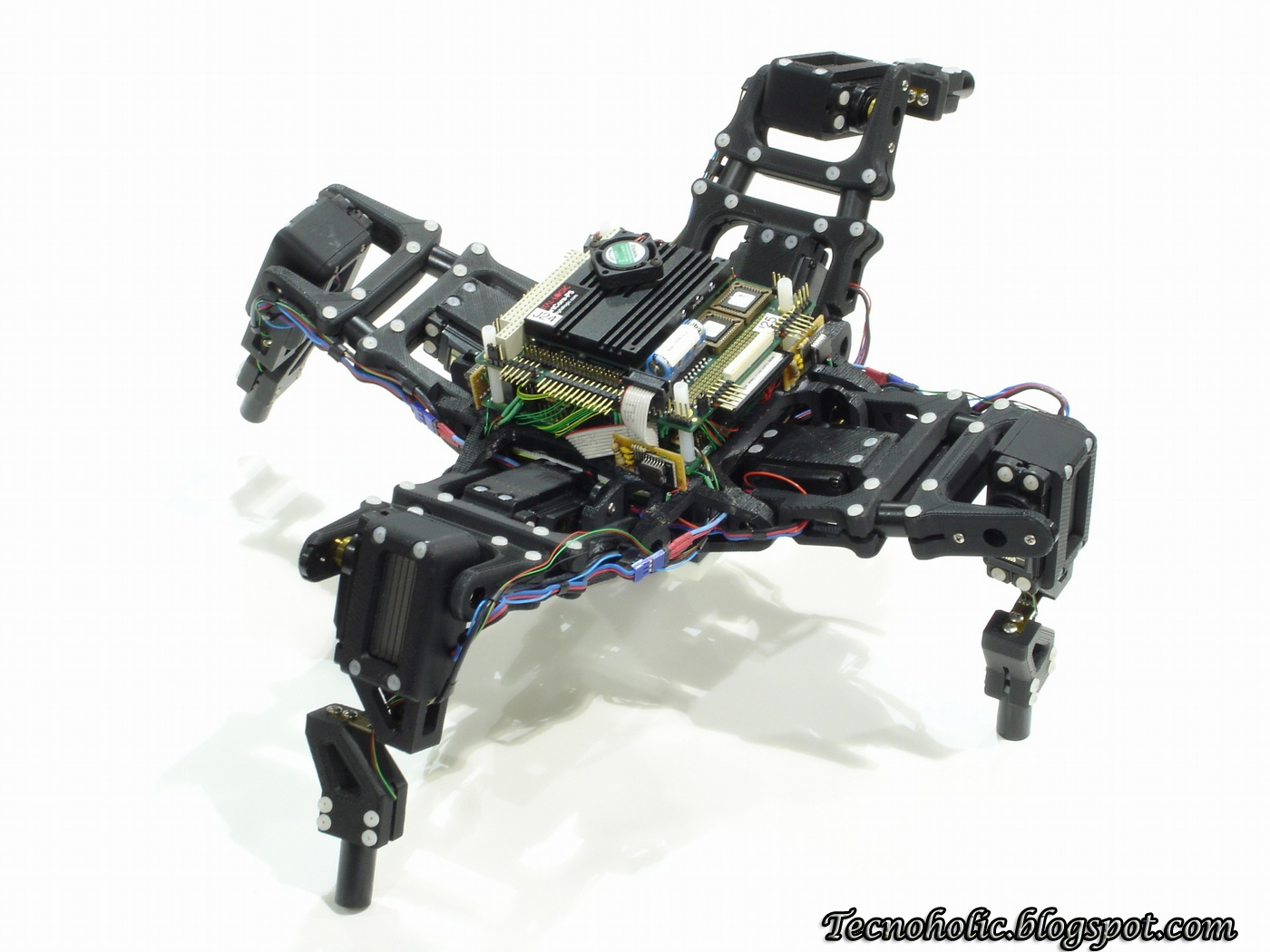
El profesor Hod Lipson de la Universidad de Cornell (situada en la ciudad de Ithaca, en el Estado de Nueva York) decidió abordar la programación de los robots desde otro punto de vista y en vez de desarrollar rutinas para realizar tareas concretas, como por ejemplo caminar, decidió desarrollar un robot que tomando consciencia de su forma fuese capaz de aprender a andar por sí solo.
El robot realiza una serie de movimientos “de sondeo” que sirven para tomar datos que sirven para dar una idea de la forma que tiene el robot y, a partir de ahí, el robot comienza a realizar algunos movimientos para medir el grado de discrepancia entre el resultado esperado y el resultado real y, a partir de ahí, realizar los movimientos más adecuados a su forma para poder desplazarse, incluso, sufriendo alguna avería en sus patas.
El dispositivo hace una serie de movimientos para darse cuenta de su forma, y luego puede comenzar a caminar de acuerdo a ella.
No hay comentarios:
Publicar un comentario